По данным Росавтодора на конец 2020 года 54.2% дорог общего пользования не отвечают нормативным требованиям — это связано со многими факторами, но один из них — не соблюдение сроков строительства и ремонта автомобильных дорог. Финансирование расходов в сфере транспорта за счет средств федерального бюджета в 2020 году составило 1204,4 млрд рублей — оно постепенно увеличивается, также растёт количество программ по обеспечению безопасности на дорогах, рациональному использованию природных ресурсов и внедрению инновационных технологий.

Постепенно снижается нагрузка на дорожную сеть за счёт её развития и увеличения межремонтных сроков, увеличивается протяженность автомобильных дорог общего пользования. И одним из приоритетных направлений развития является Цифровизация дорожной отрасли.
Беспилотные летательные аппараты (БПЛА или дроны) используют при строительстве совершенно разных объектов, и дороги — не исключение. Полезной нагрузкой на них может быть не только классическая фотокамера для аэрофотосъёмки, но и LiDAR (лазерный сканер). Применение дронов значительно сокращает время работ в поле и дает преимущество в оперативности, объективности и разнообразии полученных данных в сравнении с классическими геодезическими методами.

При использовании дронов с видео- и фотокамерой на борту, первые получаемые данные — это аэрофотоснимки с их точными координатами. Во время полёта по заданной траектории или в ручном режиме беспилотник делает фотографию и фиксирует её точную координату с помощью встроенного GNSSприёмника. Из набора таких снимков с достаточным перекрытием после фотограмметрической обработки получается точная 3D модель объекта, ортофотоплан и цифровая модель местности.


Фотограмметрический метод обработки базируется на уравнивании между собой соседних снимков за счет нахождения на них общих точек и вычислении их точных координат. Такие точки образуют собой разреженное облако точек, которое через несколько этапов трансформируется в конечные результаты.

Беспилотный комплекс для фотограмметрии. DJI Matrice 300 RTK + DJI P1 + DJI Phantom 4 RTK

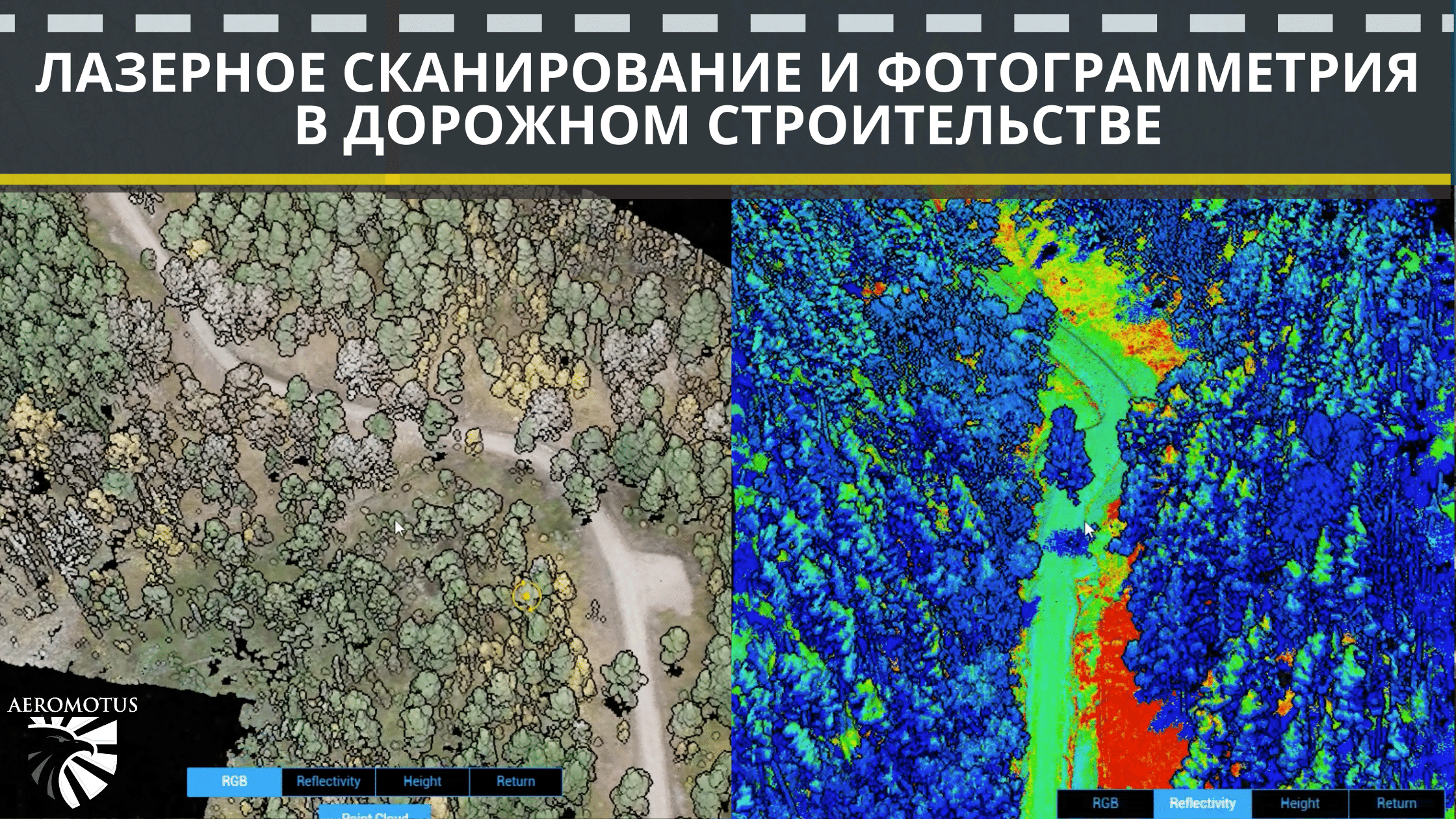
LiDAR — Light Detection and Ranging — это технология, основанная на расчёте расстояния с помощью времени прохождения сигнала/лазера до объекта и обратно до источника. Такие сигналы могут испускаться с частотой до 150 000 в секунду.

Такая высокая частота сигнала и точность фиксации времени испускания/приема сигнала позволяют инструментам получать миллионы точек с поверхности объектов. И в отличие от фотокамеры, лидары с большей частотой собирают информацию об окружающих объектах. Это преимущественно выражается на территориях с густой растительностью, где фиксированное изображение с камеры может не получить информации о поверхности под деревьями в лесу, а лидар, за счет большей частоты, может испустить и принять достаточное количество сигналов, которые смогут пройти мимо листвы до подстилающей поверхности. С помощью таких точек получают поверхность земли и строят цифровую модель рельефа, которая не учитывает высоту растительности, что важно при расчете, например, планируемых объемов земляных работ.

DJI Zenmuse L1 Лидар
Zenmuse L1 объединяет модуль лазерного лидара Livox Lidar, высокоточный IMU и камеру с 1-дюймовым CMOS на 3-осевом стабилизированном подвесе.

Актуальную обновленную информацию с полей о ходе строительства использует всегда несколько подразделений, участвующих в процессе строительства или мониторинга.

Дроны для таких задач — практически незаменимый инструмент. За счет охвата территории в короткий срок сбора данных, высокой точности и детализации результатов они обеспечивают упрощение решения таких задач, как:
Получаемые данные могут также стать основой для будущих проектов, гидрологических, геологических и других видов изысканий под план развития территории, строительство инженерных сооружений. Информация о рельефе, получаемая с лидара, используется для построения и оценки альтернативных маршрутов, и для создания окончательных планов проектирования, которые оптимизируют трассы и уклоны. Также рельеф необходим для изучения склонов во время строительства или периодического их мониторинга после окончания, для предотвращения появления возможности обвалов, сползания склона или других разрушающих процессов (González-Jorge and etc, 2012). В отличие от фотограмметрии, технология лидара менее подвержена непогоде и не так капризна с точки зрения выбора времени года и суток для проведения изысканий, с лидаром можно работать и в темное время суток, и в сезон, когда есть листва на деревьях (Center for Transportation Research and Education).
Дроны могут упростить процесс на любом из этапов проекта: как на этапе торгов, планирования работ, так и на этапах строительства и мониторинга выполненных проектов.
Выгода от использования БПЛА выражается в сохранении времени, а значит — и в финансовой составляющей. Для примера, наземное исследование 3 километров дорожного полотна займет 3-4 часа, тогда как дрон справится с этим объемом за 30-50 минут и соберет в разы больше данных и информации о территории. А при использовании мобильного пункта управления или автоматизированной станции с дронами, такие изыскания можно полностью автоматизировать и получать стабильный результат с необходимой периодичность.
Изучение точности измерений по данным аэрофотосъемки или лазерного сканирования в сравнении с традиционными методами показывают, что отличие составляет не более 1%, обычно меньше (Julge and etc, 2019).
В сравнении с традиционными наземными методами изысканий беспилотники имеют несколько преимуществ:
Не зависимо от того, какая именно технология применяется с беспилотником: фотограмметрия или лазерное сканирование, получаемые результаты и преимущества превосходят наземные исследования по скорости выполнения и объему получаемых данных, при этом не отставая по точности результатов.